Professor Plucky


Professor Plucky is a prototype guitar robot that I built to study how a robot's movement affects the way people interact with it. There is more information on the UiO project page:
Project Page
I have a number of videos about it, the playlist is here:
Playlist
Pipe Organs

I later built pipe organs for my Dr. Squiggles robots to play. You can build your own organ pipese using my pipe designer:
Organ Pipe Designer
I have a scientific article (preprint) about it here which goes into more detail
Paper about it
I have a number of videos about it, the playlist is here:
Playlist
Dr Squiggles

Dr. Squiggles is a rhythmic tapping robot that I built to study musical robot swarms. You can build your own Dr. Squiggles using this tutorial that was also published in Make magazine:
Build Tutorial
Print Article
More of the scientific aims are described on the UiO project page:
Make Magazine
and in a scientific article:
Musical Robot Swarms, Timing, and Equilibria
Organ Pipe Cactus




TellDarwin
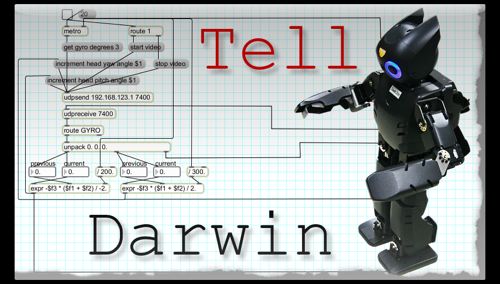 TellDarwin is a command interpreter that I wrote for DARwIn-OP Robot. It allows the robot to be controlled wirelessly from Max/MSP. Not only does the software respond to simple movement commands, but it can stream video as Jitter matricies from the robot's camera, stream audio to/from the robot's speaker/microphone, read the sensors and so forth, all using simple, intuitive commands, like "start video" and "get accelerometer". It was commissioned by the University of Georgia, Ideas for Creative Exploration (ICE), and used in a dramatic media class taught through the Department of Theatre and Film Studies at UGA. For more information, the source code, and instructions for use visit the TellDarwin documentation page. You can find even more on the Max/MSP website, Robo Savvy, and robotis.
TellDarwin is a command interpreter that I wrote for DARwIn-OP Robot. It allows the robot to be controlled wirelessly from Max/MSP. Not only does the software respond to simple movement commands, but it can stream video as Jitter matricies from the robot's camera, stream audio to/from the robot's speaker/microphone, read the sensors and so forth, all using simple, intuitive commands, like "start video" and "get accelerometer". It was commissioned by the University of Georgia, Ideas for Creative Exploration (ICE), and used in a dramatic media class taught through the Department of Theatre and Film Studies at UGA. For more information, the source code, and instructions for use visit the TellDarwin documentation page. You can find even more on the Max/MSP website, Robo Savvy, and robotis.
Singing Bowls

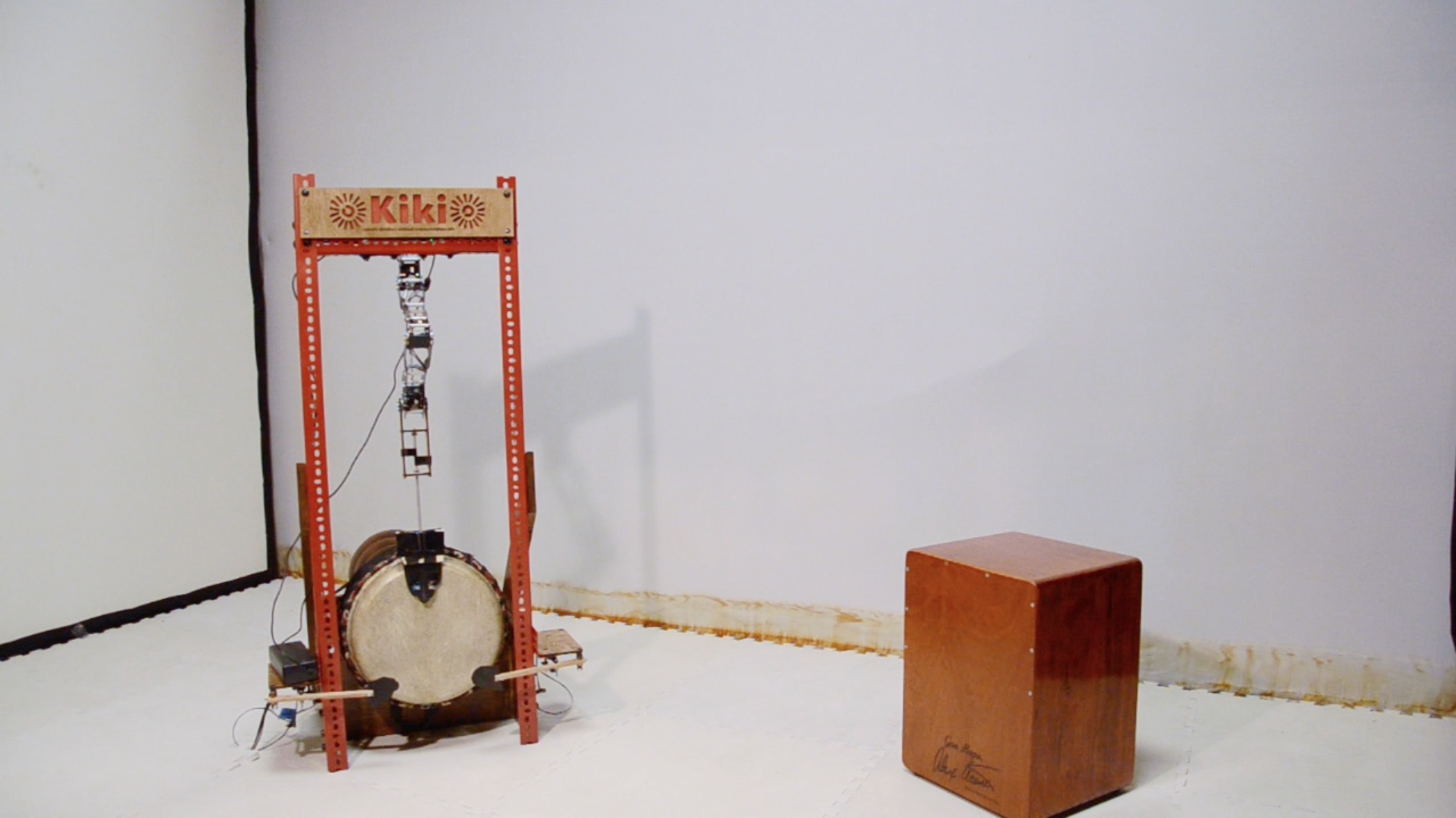
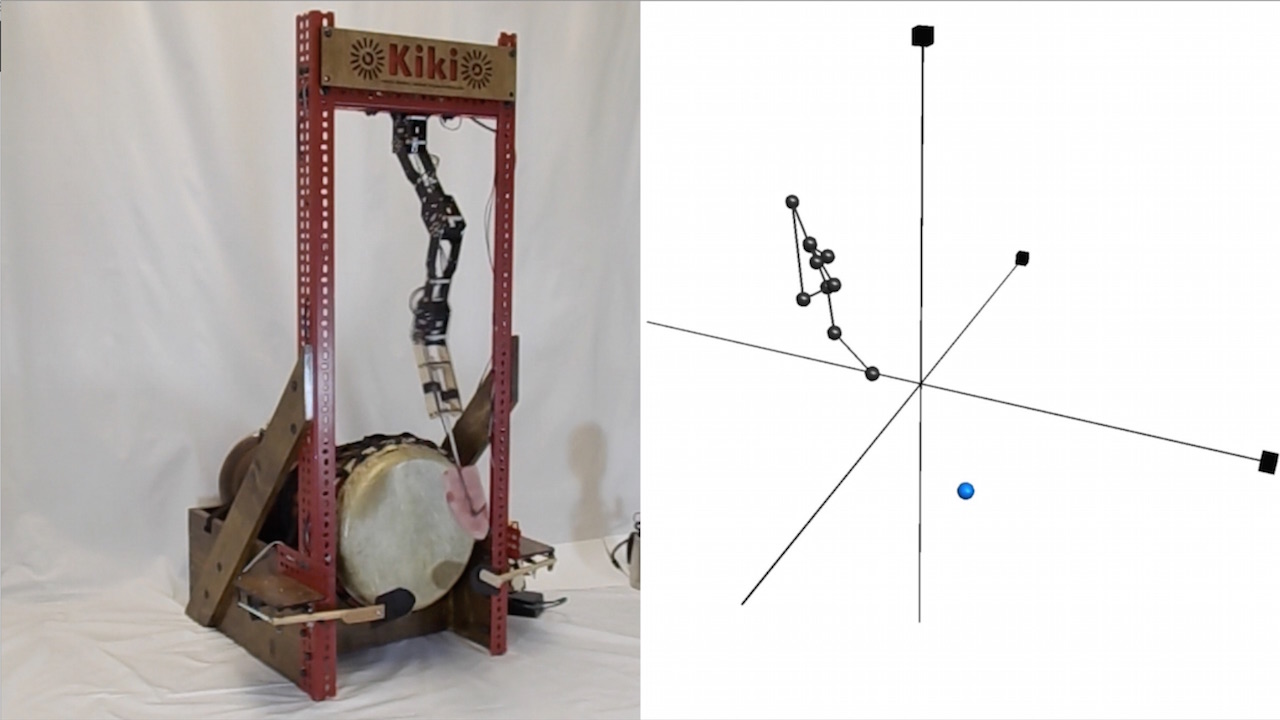
Kiki