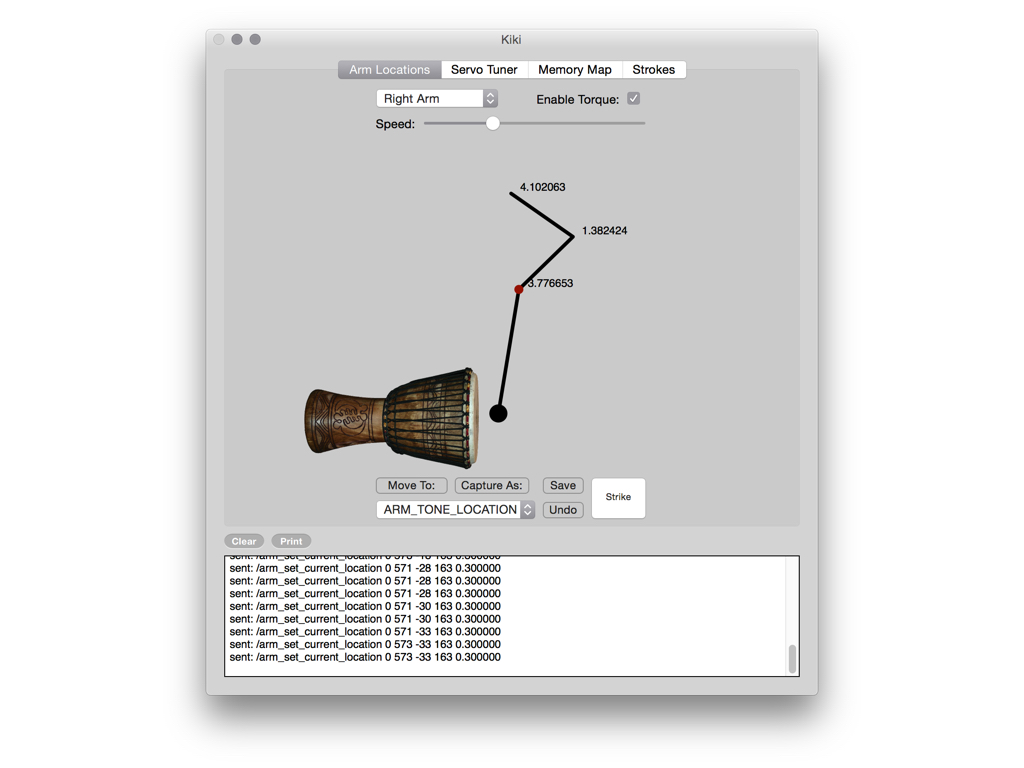
Initially when I first built this thing, if I wanted the robot to play a particular timbre, I would manually enter the values for those control parameters. But it turns out to be more difficult than you might think to produce specific timbres by manually tuning these parameters; I mean I could get close to timbres I was interested in, but I might still hear something in the sound I don't like, and it is not always immediately obvious what I should do to get rid of it. I mean, do I change the angle? In which direction? By how much? Its not always clear. So what I wanted to be able to do is just have the robot figure out which control parameters to use. In other words, I wanted to be able to play an example timbre, and have toe robot figure out what control parameters it should use to play that timbre.