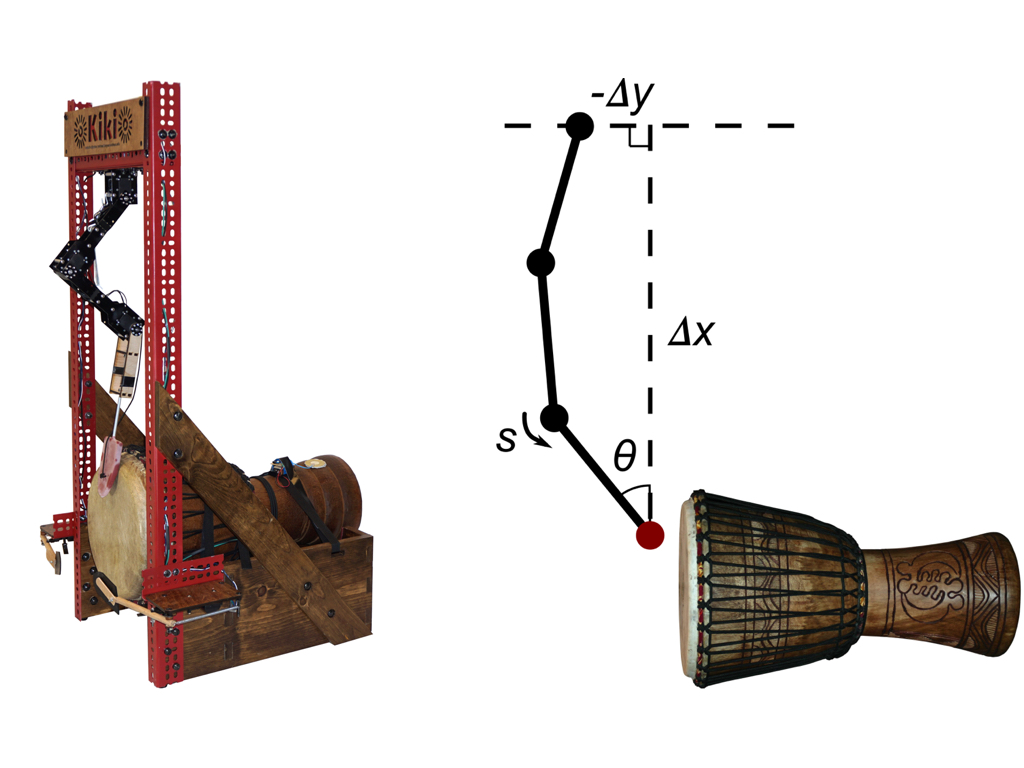
This is why if you look at Kiki, it has a three-segment arm. When Kiki strikes the drum -- you define a strike position for the arm, which could be this position, but when you ask Kiki to strike the drum it dosen't just move to the strike position, it first moves to a recoil position which is the same as the strike position but last segment has been rotated away from the drum. It might wait there for a few milliseconds try to correct for timing issues, and then at the last moment just that last segment swings forward and strikes the drum. So you have just four control parameters.